
Cálculo de las revoluciones por minuto (RPM) de un motor con encoder. Arduino y los Encoders Muchas veces es necesario calcular las revoluciones por minuto (RPM) de un motor mediante un encoder unido a su eje. Esto es clave en los péndulos invertidos, robots autobalanceados, y cualquier aplicación que necesite del control de las rpm
- Lunes - Viernes 9.00 - 18.00

hall archivos - Joober Technologies
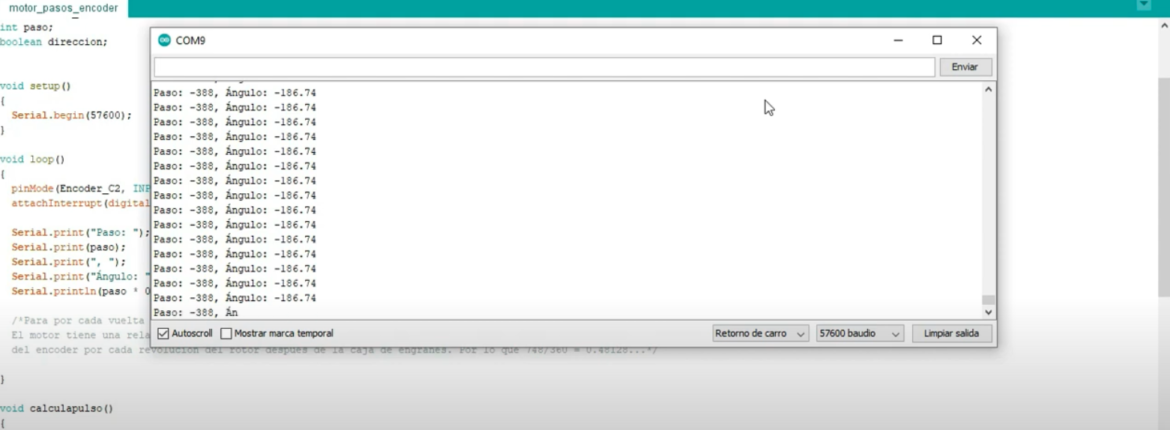
Ángulo y dirección de giro mediante encoders
Arduino: motores DC-CC con encoder. Ángulo y dirección de giro del eje. Encoder de cuadratura Hall. En esta entrada vamos a explicar cómo calcular el ángulo que gira un motor de corriente continua que tenga acoplado un encoder de cuadratura con sensores del tipo Hall desfasados 90º. El motor utilizado en el vídeo es un